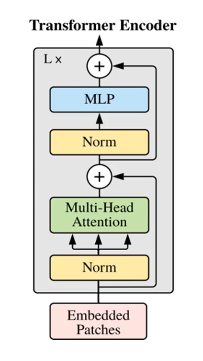
ysyx
神经网络加速器设计
1 方案设计
1.1 加速指标
对于神经网络加速器来说,需要考虑的主要指标有:
- 并行度:与计算速度和资源占用成正比;
- 计算速度:与并行度和资源占用成正比;
- 资源占用:与并行度和计算速度成正比;
目标:最大化计算速度,最小化资源占用。
1.2 加速模拟
加速器验证思路:
- 使用
Python/C++编写模块相同功能函数; - 为硬件模块与软件函数搭建对应
testbench,记录模拟结果; - 对比两者输出数据是否一致(随机抽样验证);
- 若发现错误,修改模块,并重新验证。
1.3 关键算子
- 浮点:
addf16,mulf16 - 矩阵:
mulmat - 层:
softmax,laternorm
1.4 加速方案
- 查表法:查表法是一种常用的加速算法,它通过提前计算并存储某些数据或结果,然后在需要时直接查表获取结果,从而避免重复计算。这种方法通常用于需要频繁进行某些固定计算的场景,可以显著提高计算效率。
- cordic:CORDIC(Coordinate Rotation Digital Computer)算法是一种用于计算三角函数、对数和其他数学函数的快速算法。它通过迭代地进行坐标旋转和移位运算来逼近目标函数值,是一种高效且精确的计算方法。CORDIC算法在数字信号处理、通信系统等领域广泛应用,并且在硬件实现上具有很高的效率。
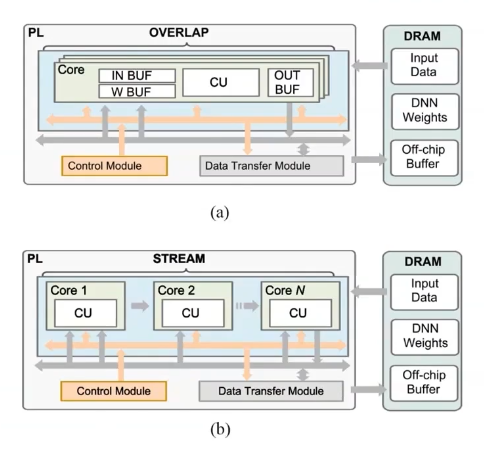
1.5 加速器分类
- 单PE加速器(Single Processing Engine):脉动阵列处理每一层网络,使用共享资源对不同层加速,兼容性强,延迟性大。重叠模式(Overlap Pattern)。
- 流式加速器(Steam Architecture):流式处理,使用不同资源对不同层独立加速,兼容性弱,延迟性小。流模式(Stream Pattern)
++++
对于重叠模式下的架构:这些PE算子可跨层复用,但使用了片外DDR,由PS与PL通信控制,计算延迟受限于通信带宽。
++++
其他加速器:
- 向量处理器(Vector Processor):卷积向量算子硬件化(平方、除法、乘积),本质是单PE。
- 神经突触处理器(Neurosynaptic Processor):针对CNN处理器,存算一体,网络映射难度较大。
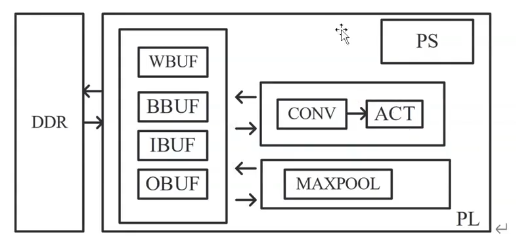
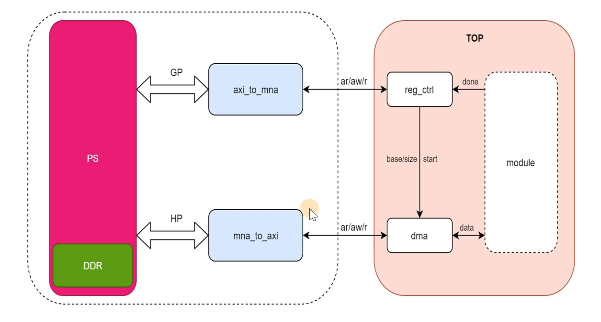
1.6 PS & PL
- 交互:
gp,hp,ready-valid - 数据:
reg_ctrl,dma
1.7 浮点量化
半精度浮点数float16:常用于实现加速器中的浮点数运算。其结构:
- 符号S:1 bit
- 指数E:5 bit
- 尾数M:10 bit
|S| E | M |
16| |14 10|9 0|
FP16 = (-1)^S * 1.M * 2^(E - 15)
Range: [5.96*10^-8, 6.55*10^4]
++++
1.7 整型量化
1.8 低功耗设计
待定
2 模块加速
2.1 Conv模块加速
对卷积层进行模块分解:
- 顶层:
ConvLayer卷积层模块 - 激活函数:
Tanh激活函数、Softmax激活函数 - 池化层:
AvgPool平均池化层 - 算子:
- 浮点:
mulf16半精度浮点乘、addf16半精度浮点加
- 浮点:
2.1.1 Convolution Layer
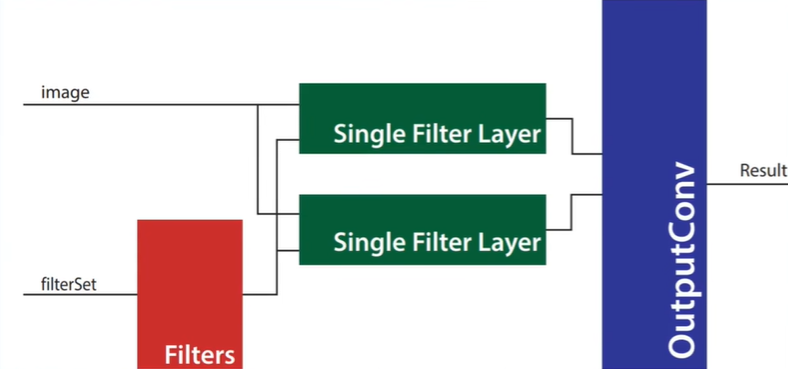
一个卷积层有多个卷积核(Filter),image输入到不同的核得到不同的特征(Feature),自顶向下先观察Multi Filter Layer,其输入图像和六个卷积核,输出卷积结果。
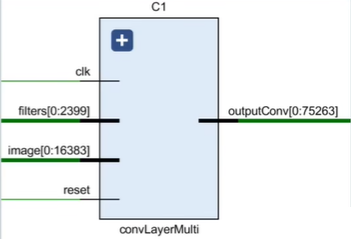
网络ConvLayerMulti层输入矩阵规模:image 32*32, filterSet 5*5
++++
模块ConvLayerMulti层输入:
image: 1 * 32 * 32 * 16 = 16384
filters: 6 * 5 * 5 * 16 = 2400
outputConv: 1 * 28 * 28 * 16 = 12544
^ channel ^ scale ^ bitwidth
++++
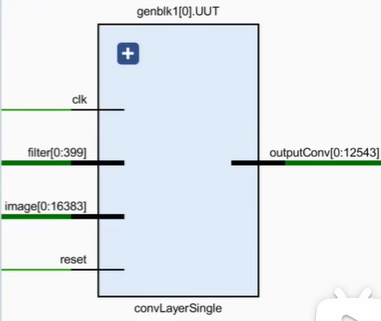
对于单个卷积核(Filter),再观察Single Filter Layer,其输入图像和单个卷积核,输出特征图(Feature Map)。
++++
模块ConvLayerSingle层输入:
image: 1 * 32 * 32 * 16 = 16384
filters: 1 * 5 * 5 * 16 = 400
outputConv: 1 * 28 * 28 * 16 = 12544
^ channel ^ scale ^ bitwidth
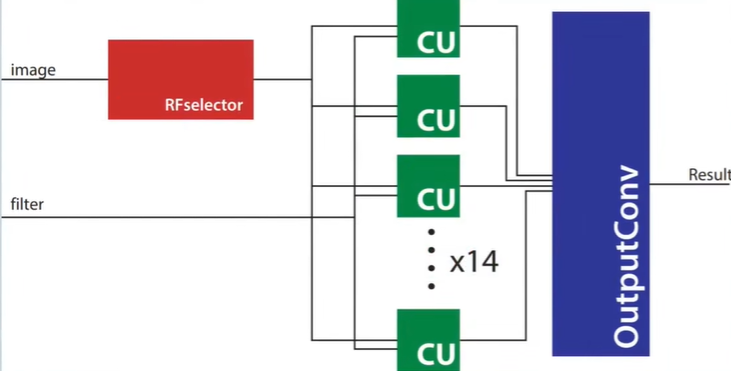
2.1.2 Convolution Unit
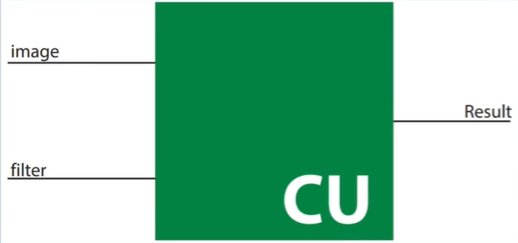
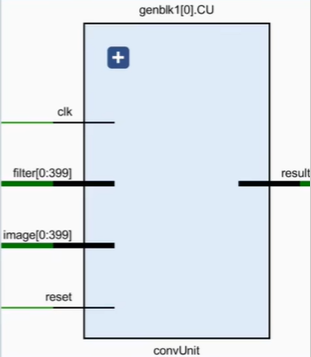
一个卷积核(Filter)与一个输入图像(Image)进行卷积运算,得到特征图(Feature Map),这个过程通过ConvUnit模块实现。
++++
CU模块循环使用PE模块实现一个窗口的卷积操作,并输出一个半精度浮点型(FP16)计算结果。

2.1.3 Processing Element
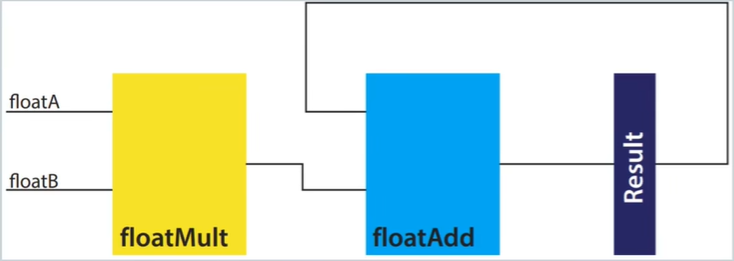
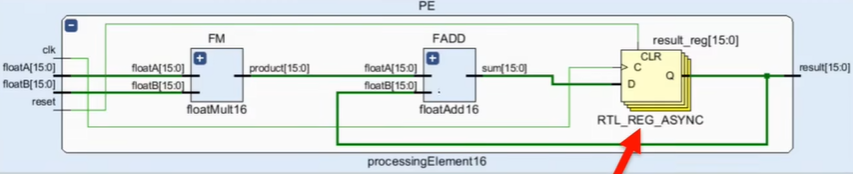
卷积进行的具体操作是点乘,这里本质上是浮点算子:mulf16乘、addf16加,这里通过PE模块实现。
++++
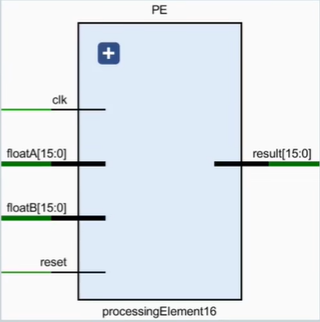
元素处理(PE)模块:执行具体卷积操作,即权重与数据相乘后累加。添加result_reg,将电路从组合逻辑转化为时序逻辑,保证数据同步。
++++
元素处理(PE)模块代码演示:
module PE(
clk, rst,
fA, fB, res
);
parameter DATA_WIDTH = 16; // 数据位宽
input clk, rst;
input [DATA_WIDTH-1:0] fA, fB;
output reg [DATA_WIDTH-1:0] res;
wire [DATA_WIDTH-1:0] mul_res;
wire [DATA_WIDTH-1:0] add_res;
// 1. 计算乘法结果
mulf16 FMUL(.fA(fA), .fB(fB), .res(mul_res));
// 2. 计算累加结果
addf16 FADD(.fA(fA), .fB(fB), .res(add_res));
always @(posedge clk or posedge rst) begin
if(rst == 1'b1) begin
res <= 0;
end else begin
res <= add_res;
end
end
endmodule
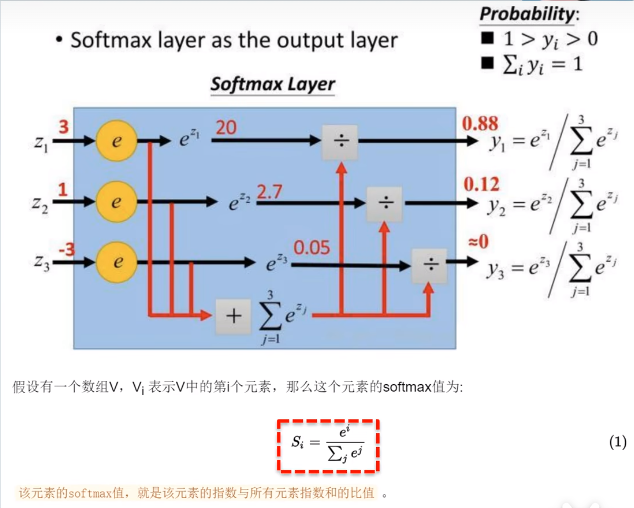
2.1.4 Softmax Layer
Softmax函数将输入归一化,求得各个类概率。输入规模与输出规模相同(400)。
++++
计算过程(时序逻辑):
- 指数计算:将多个输入分别送到各自的
exponet求指数, - 计算指数和:加法器累加
- 求指数和倒数:使用
FloatReciprocal计算 - 得到每个元素softmax值:乘法器计算
2.1.5 Exponent
指数模块exponent,求解$e^x$值,输入规模与输出规模相同(32),使用泰勒展开拟合:
- 两个乘法器:分子 & 分母。
- 一个加法器:累加。
2.2 Pool模块加速
对平均池化层分解:
- 顶层:
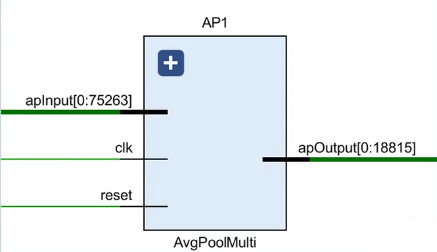
AvgPoolMulti(通道平均池化) - 中间层:
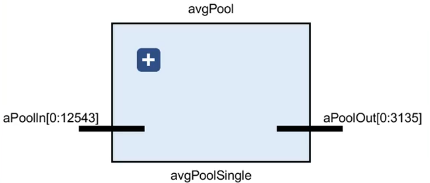
AvgPoolSingle(单通道平均池化) - 底层:
AvgU(平均池化单元)
2.2.1 Average Pool Layer
多通道平均池化层(Average Pool Multi)并行度为1,循环使用AvgPoolSingle完成所有通道的平均池化。(时序逻辑电路)
++++
单通道平均池化(Average Pool Single):全并行度,每个窗口都有一个AvgU运算模块。(组合逻辑电路)
2.2.2 Averaging Unit
平均池化单元(AvgU):每个通道的平均池化操作:求输入的四个数(位宽16 * 4)的均值,先求和,再乘以0.25得到均值(位宽16)。(组合逻辑电路)
- 三个加法器:numAdd = numA + numB + numC + numD
- 一个乘法器:numAvg = 0.25 * numAdd
优化:插入寄存器形成pipline。
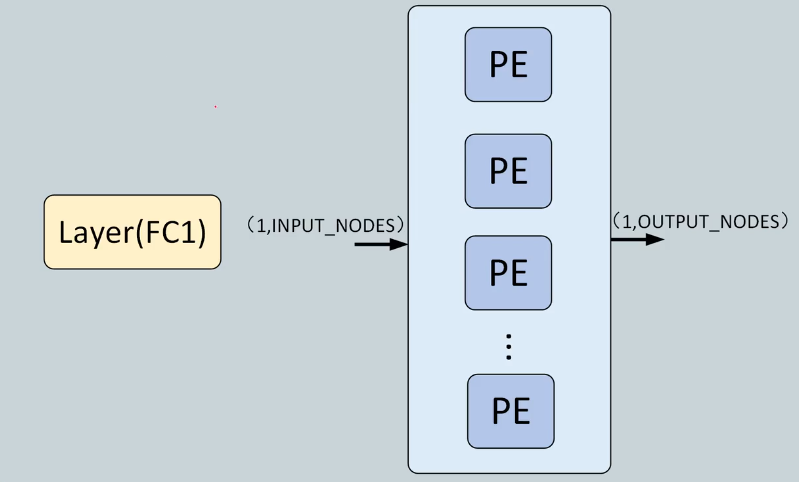
2.2 FC模块加速
对全连接层分解:
- 顶层:
FCMulti(通道全连接) - 中间层:
FCSingle(单通道全连接),激活函数为Tanh - 底层:
PE计算模块
2.2.1 FC Layer
全连接层(Full Connection Layer):进行线性计算,矩阵向量乘,向量和。
\[y = xW^T + b\]注意:多层之间加上
Tanh非线性激活函数。
2.2.2 PE
PE是一个乘法器和加法器实现,实现累乘和累加。
3 项目概览
3.1 项目目录
参考如下CNN加速器目录:
.
├── vivado_project # 项目完整网络的vivado工程
├── conv_code # 不同并行度的卷积模块代码
├── final_code # 各模块以及网络顶层代码
│ ├── Part1. Convolution
│ ├── Part2. TanH Activation
│ ├── Part3. Softmax Activation
│ ├── Part4. Average Pooling
│ ├── Part5. Intergration
│ └── ...
├── test_scripts # 各个模块验证脚本
│ ├── Test1. ANN Test
│ ├── Test2. TanH Test
│ ├── Test3. Text Files Test
│ ├── Average Pooling Python Code
│ ├── Convolution Python Code
│ ├── Softmax Python Code
│ └── ...
├── results # 仿真截图,综合报告,验证数据表格
├── weights # 卷积与全连接层权重和偏置数据
├── hw_design.pdf # 项目硬件设计文档
└── README.md # 项目介绍